构建机器人动力学认知,需要从经典力学出发,逐步深入到多体系统与空间环境。
做机器人和空间机器人动力学研究,最常被问到的问题是:"需要掌握哪些力学知识?"这个问题看似简单,实则涉及多个力学分支的交叉融合。今天,从实战角度谈谈这个话题。
为什么力学基础如此重要
在实际项目中,我见过不少工程师直接上手机器人控制算法,却在遇到动力学耦合、奇异点、非完整约束等问题时束手无策。根源在于力学基础不扎实。机器人系统本质上是多刚体约束系统,其运动规律完全遵循经典力学定律。没有扎实的力学功底,就像在沙滩上建高楼。
空间机器人的情况更为复杂。微重力环境下,地面上习以为常的假设不再成立:没有固定基座支撑,动量守恒约束主导整个系统行为,机械臂运动会导致本体姿态改变。这些特性要求更深入的力学理解。
核心力学知识框架
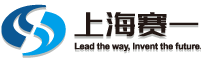
理论力学:万物之始
理论力学是整个力学体系的基石。运动学研究物体运动的几何特性——位置、速度、加速度的描述与计算;动力学则探究力与运动的关系——牛顿定律、动量定理、能量守恒。
在机器人领域,运动学解决"机器人末端在哪里"的问题,动力学则回答"需要多大的力矩才能实现这个运动"。前者用于轨迹规划,后者用于电机选型和控制器设计。
刚体运动学是另一个重点。三维空间中刚体的姿态描述有多种方法:旋转矩阵、欧拉角、四元数、轴角表示等,每种方法都有其适用场景和局限性。实践中,在不同阶段可以使用不同表示:几何直观用欧拉角,数值计算用旋转矩阵,避免奇异点用四元数。
分析力学:优雅的建模工具
分析力学提供了一套基于能量的建模方法,相比牛顿力学更适合处理复杂约束系统。
拉格朗日力学是机器人动力学建模的主流方法。它从系统的动能和势能出发,通过变分原理推导出运动方程。这种方法的优势在于:自动满足约束条件,无需考虑内力,适合符号推导和数值求解。
工程实践中,主要使用拉格朗日方程建立多自由度机械臂的动力学模型。虽然符号推导过程繁琐,但一旦建立起来,控制律设计和仿真验证都会变得相对容易。
哈密顿力学从相空间角度描述系统,引入广义动量和哈密顿量。虽然在机器人建模中不如拉格朗日方法常用,但在最优控制、状态空间分析、辛几何方法等领域有独特价值。对于从事高级控制研究的工程师,哈密顿力学值得深入学习。
虚功原理和达朗贝尔原理处理约束系统的有力工具。在分析含有非完整约束的轮式机器人、含有摩擦接触的多指抓取系统时,这些原理提供了系统化的处理方法。
多体动力学:机器人的语言
机器人系统是典型的多刚体系统,需要建立各个连杆之间的运动关系和力传递关系。
雅可比矩阵是连接关节空间和任务空间的桥梁。它描述了关节速度如何映射到末端速度,也描述了末端力如何分配到各关节。雅可比矩阵的奇异性对应机器人的奇异位形——某些方向无法施力或运动,这是轨迹规划时必须回避的。
牛顿-欧拉方程与拉格朗日方程的等价性在理论上已被证明,但工程应用中两者各有千秋。牛顿-欧拉递推算法计算效率高,适合实时控制;拉格朗日方法推导清晰,适合符号建模。在初步设计可以用拉格朗日,实时控制用牛顿-欧拉。
螺旋理论与李群李代数是现代机器人学的几何工具。螺旋理论用六维向量统一描述力和运动,李群SE(3)描述刚体运动的群结构。这些工具提供了更简洁、更几何化的建模方法,在机器人运动学和动力学中应用广泛。
空间机器人:特殊的挑战
空间机器人在微重力环境下工作,面临地面机器人没有的独特问题。
动量守恒约束是空间机器人的核心特征。没有固定基座,系统总动量和总角动量守恒。这意味着机械臂的运动会引起本体姿态和位置的改变,必须在控制策略中考虑这种耦合效应。
非完整约束是另一个特殊性。空间机器人的构型空间维数高于可独立控制的自由度,导致非完整性。路径规划不能简单地在关节空间中进行,必须考虑动量约束的影响。
姿态动力学涉及刚体定点转动的欧拉方程、姿态描述的运动学方程、姿态确定和控制算法。空间飞行器常用反作用轮、控制力矩陀螺、推力器等执行机构,每种都有其力学特性和控制方法。
轨道-姿态耦合在近地轨道表现明显。重力梯度力矩、大气阻力、太阳光压等环境力矩会影响航天器姿态,必须在动力学模型中考虑。
推荐教材与学习资源
基础阶段
《Introduction to Robotics: Mechanics and Control》(John J. Craig著)是最经典的入门教材。内容通俗易懂,覆盖运动学、动力学、轨迹规划等基本主题。DH参数法虽然在现代研究中逐渐被其他方法取代,但作为基础训练仍有价值。我建议初学者从这本书入手,建立基本概念。
《Modern Robotics: Mechanics, Planning, and Control》(Lynch & Park著)采用现代几何方法,基于螺旋理论建立完整的机器人学框架。这本书的特点是数学严谨、方法统一、配套资源丰富(包括在线视频课程、Coursera课程、代码库)。如果你愿意接受一定的数学抽象,这本书会让你受益匪浅。
进阶阶段
《A Mathematical Introduction to Robotic Manipulation》(Murray, Li & Sastry著)是分析力学在机器人学中应用的经典著作。李群李代数、螺旋理论、非完整约束、多指抓取等主题都有深入论述。数学要求较高,但对于希望掌握现代机器人理论的工程师来说,这本书值得反复研读。
《Fundamentals of Robotic Mechanical Systems》(Jorge Angeles著)兼顾理论和算法,工程应用性强。机构学基础、运动学分析、动力学建模、优化设计等主题都有详细阐述。我特别欣赏作者对力学原理和工程实践的平衡处理。
专业方向
《Space Robotics: Dynamics and Control》专门针对空间机器人的动力学与控制。微重力环境建模、动量守恒应用、姿态控制等主题是地面机器人教材不涉及的。从事空间机器人研究的工程师必读。
《Fundamentals of Spacecraft Attitude Determination and Control》(Markley & Crassidis著)是空间飞行器姿态控制的权威教材。姿态动力学、传感器系统、滤波算法、控制律设计等内容非常全面。虽然不是专门的机器人教材,但对于理解空间机器人的姿态控制问题极有帮助。
分析力学经典
《Classical Mechanics》(Herbert Goldstein著)是分析力学的标准教材。拉格朗日力学、哈密顿力学、变分原理、正则变换等主题的论述深刻而严谨。这本书偏重理论物理视角,但对于希望深入理解分析力学原理的工程师来说,是绕不过的经典。
《Analytical Mechanics》(Hand & Finch著)从物理视角介绍分析力学,数学推导严谨但不失物理直观。相比Goldstein的书,这本更适合自学,例题和习题质量都很高。
学习路径建议
根据经验,系统学习机器人动力学大约需要1.5-2年时间(假设每周投入10-15小时)。
第一阶段:理论力学基础(3-6个月)
重点掌握运动学描述方法、牛顿动力学、刚体运动学、坐标变换。这个阶段建议配合大量练习,确保基本概念清晰。
推荐教材:Craig的《Introduction to Robotics》前4章,配合理论力学教材(如周衍柏《理论力学教程》或Goldstein前三章)。
实践建议:用MATLAB或Python实现简单机械臂的正逆运动学,理解旋转矩阵、齐次变换等概念的实际意义。
第二阶段:分析力学方法(3-4个月)
学习拉格朗日方程、哈密顿方程、约束系统处理方法。这个阶段的难点在于从牛顿力学的思维方式转向能量方法。
推荐教材:Goldstein的《Classical Mechanics》第1-2章、第8-9章,或Hand & Finch的《Analytical Mechanics》。
实践建议:用拉格朗日方法推导2-3自由度机械臂的动力学方程,对比数值解和实验数据,体会建模的准确性。
第三阶段:机器人专题(6-8个月)
深入学习螺旋理论、李群李代数、多体动力学算法、非完整约束系统。这个阶段需要阅读大量论文,了解领域前沿。
推荐教材:Lynch & Park的《Modern Robotics》、Murray等的《A Mathematical Introduction to Robotic Manipulation》。
实践建议:实现一个完整的机械臂动力学仿真器,包括正逆运动学、动力学、轨迹规划、基本控制。参与开源机器人项目(如ROS、Drake、Pinocchio),理解工程实现细节。
第四阶段:空间机器人专题(4-6个月)
如果研究方向涉及空间机器人,需要专门学习空间环境建模、动量守恒约束、姿态动力学。
推荐教材:《Space Robotics》、《Fundamentals of Spacecraft Attitude Determination and Control》。
实践建议:建立一个简单的平面空间机器人模型(浮动基座+平面二连杆),实现动量守恒约束下的运动规划和控制。
工程实践的几点思考
建模精度的权衡
理论上,可以建立包含所有细节的高精度模型:连杆弹性变形、关节摩擦、齿轮间隙、传动柔性等。但实践中,模型复杂度要与控制需求匹配。
工程实践上:初步设计阶段用刚体模型,控制器设计阶段增加摩擦和传动特性,高精度要求时才考虑弹性效应。过早引入复杂因素会掩盖主要矛盾,反而不利于问题定位。
数值计算的稳定性
多体动力学方程通常是刚性微分方程组,显式积分方法容易出现数值不稳定。建议使用隐式方法(如Runge-Kutta系列)或专门的多体动力学求解器(如ODE45、Drake、MuJoCo)。
实时控制系统对计算效率要求极高。递归牛顿-欧拉算法的计算复杂度是O(n),远优于直接求解拉格朗日方程的O(n³)。在嵌入式系统中,这种效率差异可能决定控制算法能否实时运行。
实验验证的重要性
理论模型必须通过实验验证。我见过太多"理论完美、实际失效"的案例。传感器噪声、建模误差、未建模动态都会影响实际性能。
建议在建模的同时设计验证实验:运动捕捉系统测量位姿、力传感器测量接触力、IMU测量加速度。模型与实验的对比是提升建模能力的最快途径。
跨学科整合
现代机器人学高度交叉:机械工程提供硬件基础,控制理论提供算法保证,计算机科学提供实现工具,人工智能提供智能决策。单一学科背景很难应对复杂系统的挑战。
我的建议是在掌握力学基础后,尽快拓展控制理论(线性系统、非线性控制、最优控制)和计算机实现(编程、算法、软件工程)。这些能力的结合才能让力学知识真正发挥价值。
结语
机器人与空间机器人动力学是一个既古老又现代的领域。古老在于它建立在几百年发展的经典力学基础上,现代在于它与最新的控制理论、人工智能、计算方法紧密结合。
扎实的力学基础需要时间积累,没有捷径。但一旦建立起完整的知识框架,你会发现很多看似复杂的问题都可以追溯到基本的力学原理。这种从复杂回归简单的能力,是工程师最宝贵的素质。
最后,想强调一点:学习力学不是为了炫耀数学技巧,而是为了解决实际问题。理论和实践的结合、思考和动手的平衡,才是工程师应有的态度。
- 上一篇:涡轮增压器压气机仿真分析 2026/1/23
- 下一篇:星型人字齿轮瞬态温度场仿真 2026/1/22