行星齿轮减速有限器元分析报告
行星齿轮减速器具有体积小、结构紧凑、传动比大、效率高、轴承负荷小、可同轴传输运动和动力等优点,在很多情况下可代替定轴轮系传动机构,是机械工程领域广泛应用的传动类型。然而,齿轮传动过程中两轮齿间的啮合是线接触,啮合部位容易磨损,甚至造成齿轮轮齿折断,致使行星轮系传动失效,因此有必要对行星轮系进行静力学有限元分析,以改进行星轮系传动效率,减少齿轮传动过程中的振动和噪音,优化传动性能,提高使用寿命。同时,行星减速器在工作过程中,传动齿轮受到外部周期性载荷作用,在额定转速内有可能发生强烈的共振,动应力急剧增加,致使齿轮过早出现扭转疲劳和弯曲疲劳,最终引起轮齿折断。在行星轮系结构设计和计算中,静力学计算不能完全满足设计要求,因此有必要对行星轮系装配体进行模态分析,确定结构的振动特性,获得其固有频率、振型等参数。通过模态分析找出结构设计中的薄弱环节,避免行星轮系在外部载荷作用下产生共振,因此模态分析是行星轮系结构设计的重要内容,同时也是进行其他动力学分析前期必须完成的工作。
本次报告以2K-H行星减速器行星轮系为例,以减速器的核心传动装置为研究对象,运用三维参数化设计软件Solidworks建立了行星轮系的数字化模型,然后将其导入有限元分析软件ANSYS Workbench中,对模型进行了静力学有限元分析,分析了在给定的工作状况下它的静力学特征。最后对行星轮系传动系统进行了模态分析,确定了装配体的振动特征、模态及振动薄弱环节,以便帮助改进系统设计和避免共振,为齿轮传动动态设计提供了依据。
一、 2K-H行星减速器行星轮系模型
2K-H行星齿轮减速器结构由行星齿轮、太阳轮、齿圈和行星架组成。齿圈固定,动力由太阳轮输入,通过行星架输出。应用Solidworks软件建立行星齿轮、太阳轮和齿圈的三维参数化模型,参数值如表1所示,最后完成装配。
表1 行星齿轮减速器行星轮系参数表
|
零件名称 |
齿数/z |
齿宽/mm |
模数/mm |
压力角/(°) |
|
太阳轮 |
16 |
12 |
3.5 |
20 |
|
行星轮 |
32 |
|||
|
齿圈 |
80 |
再将其导入到ANSYS Workbench中,模型如图(1)所示。
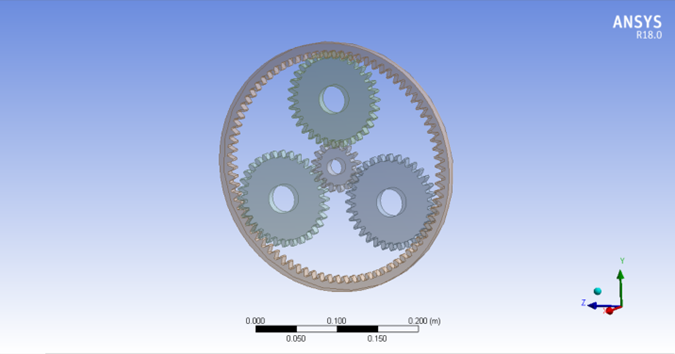
图1 行星轮系参数化模型
二、 静力学分析
1.设置材料属性
按表2对各零件赋予材料属性
表2 行星轮系的材料参数
|
零件名称 |
材料 |
弹性模量/Pa |
泊松比 |
密度/(Kg/m3) |
屈服极限/MPa |
强度极限/MPa |
|
太阳轮 行星轮 |
42CrMo |
2.12×1011 |
0.28 |
7850 |
1080 |
930 |
|
齿圈 |
40Cr |
2.11×1011 |
0.277 |
7870 |
980 |
785 |
2.网格划分
在为了提高计算效率,在ANSYS Workbench中行星轮系装配模型采用自由网格划分的方法,实际就是在四面体和扫掠型划分之间自动切换,在划分过程中设置“ Relevance Center ”为“Fine”,网格大小为5mm,划分网格后的有限元模型如图2所示。
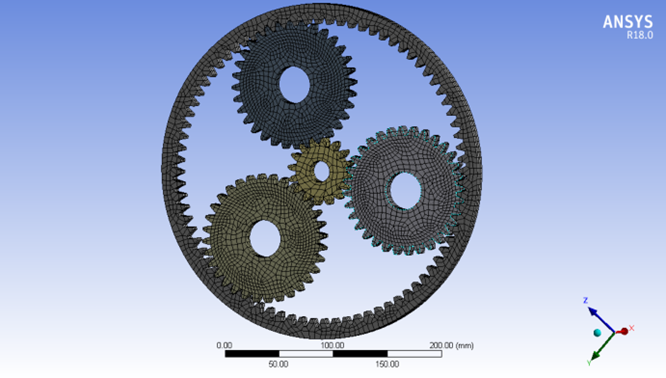
图2 网格划分图
3.定义边界条件
模型导入ANSYS Workbench软件后,系统将自动为行星轮系传动装配模型增加接触关系,对一般的静力学接触问题分析,只需确定其他约束关系和载荷,即可进行静态求解。在三个行星齿轮轴颈、太阳轮轴颈处施加圆柱面约束以模拟轴承支承,切线方向设定为“自由”,在齿圈的外圈添加固定约束。根据行星轮系工作要求,在太阳轮(动力输入轴)轴颈处加载转矩1.8×105 N·mm,加载后的有限元模型如图3所示。在静力学分析设置选项中,设置“Large Deflection”为“ on ”,激活大变形,然后进行求解。
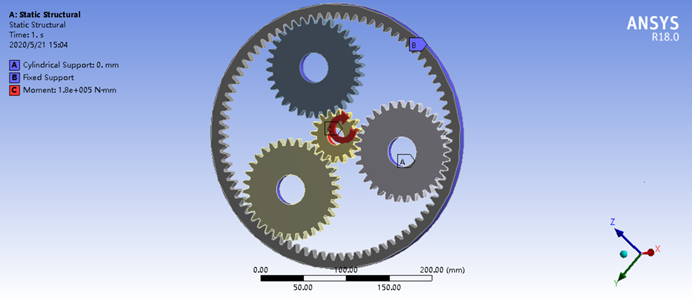
图3 边界条件图
4.分析结果
1)等效应力分析
通过对行星轮系传动有限元模型的求解,得到总体等效应力云图,如图4所示。从图中可以看出:在给定工况下,等效应力主要分布在太阳轮与三个行星齿轮啮合处,最大等效应力发生在太阳轮的齿根圆角处,最大值为119.64MPa。通过分析可得到:在预载荷条件下,行星轮系传动系统最可能的失效是太阳轮沿齿根圆角处的轮齿断裂。由于太阳轮材料的屈服极限σb=1080MPa,最大等效应力远小于材料的屈服极限,满足强度设计要求,因此太阳轮设计是安全的。
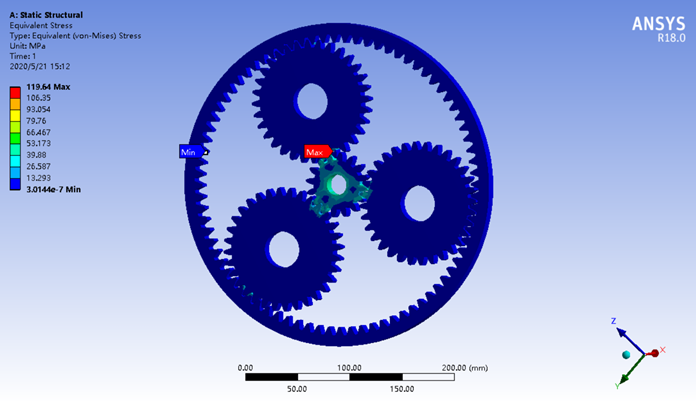
图4 等效应力云图
2)应变分析
图5所示为总位移分布情况,由图5可知:太阳轮与三个行星齿轮啮合部位等效应变比较大,啮合齿轮齿根变形比周围大。最大位移发生在太阳轮齿轮顶部,其最大值为9.75×10-3 mm ,变形量相对较小,不影响行星轮系正常工作。
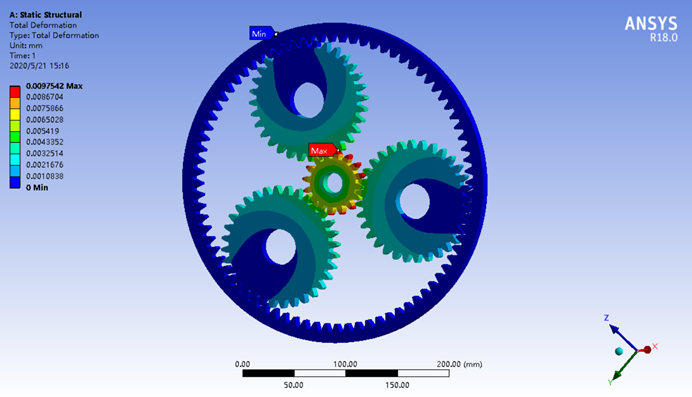
图5 应变云图
三、 模态分析
模态分析中行星轮系传动作为一个装配体,所有零件都被固定,两零件间的联接方式选择“ bonded ”模式,将行星轮系三维实体模型导入ANSYS Workbench 软件后,选择分析类型为模态分析。与静力学有限元分析方法类似,需要建立材料属性、定义网格属性,施加圆柱约束、固定约束等。进入Mechanica窗口,考虑到该模型的大小和实际的硬件设备,设置求解模态数为6阶,进行求解计算,得到齿轮传动前6阶固有频率(表2)和前6 阶模态振型图(图6)。
表2 齿轮传动链前6阶固有频率
|
模态 |
一阶 |
二阶 |
三阶 |
四阶 |
五阶 |
六阶 |
|
频率/Hz |
5868.4 |
5875.2 |
5878.2 |
5989.5 |
6198.5 |
6204.3 |
从表2可以看出,行星轮系前六阶模态固有频率没有重叠,工作中可以有效地避免共振现象的发生。图6(a)~(f)为前六阶模态振型图,一阶模态为左边行星齿轮在YZ面内的振动;二阶模态为上边行星齿轮在YZ面内的振动,右边行星齿轮挤压变形;三阶模态为右边行星齿轮沿YZ面内的振动,上边行星齿轮挤压变形;四阶模态为三个行星齿轮及太阳轮绕X轴的振动扭转变形;五阶模态为上边行星齿轮沿X轴方向的振动扭转变形;六阶模态为左边行星齿轮沿X轴方向振动扭曲变形。
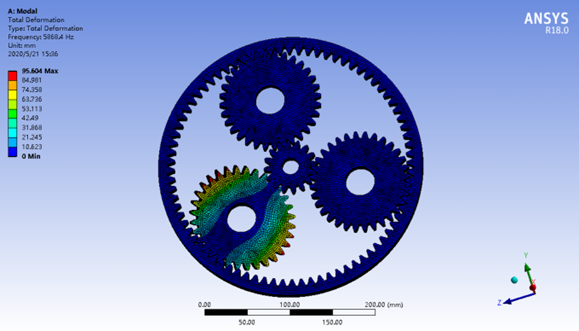
(a)一阶模态
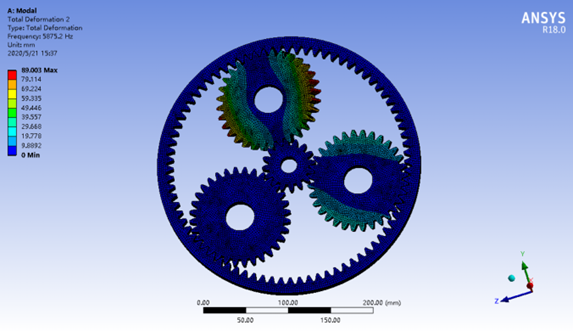
(b)二阶模态
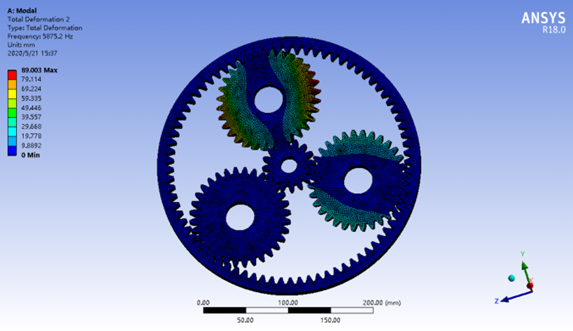
(c)三阶模态
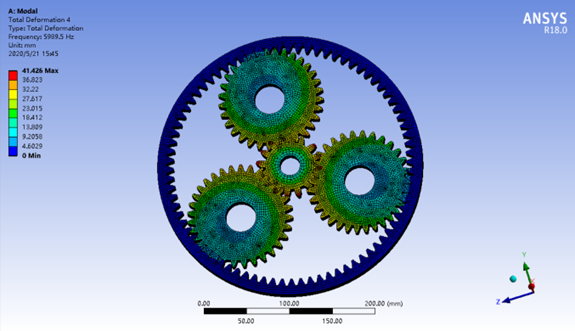
(d)四阶模态
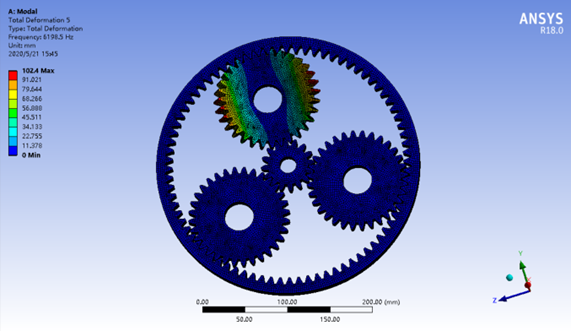
(e)五阶模态
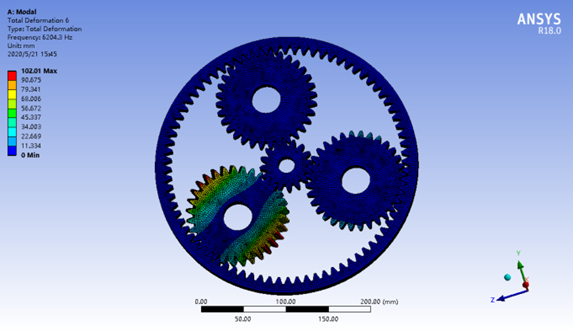
(f)六阶模态
图6 行星轮系前六阶模态图
从以上分析可以看出:行星轮系的主要模态为行星齿轮的扭转变形,若出现共振将会导致行星架产生明显扭曲变形。对行星轮系进行整体模态分析,可以克服行星轮系传动系统在工作过程中产生共振,避免重大事故的发生。
四、 结论与建议
(1)进行了行星轮系传动静态有限元分析,得到了等效应力、应变云图。结果显示,工作过程中太阳轮与行星轮啮合部位及太阳轮齿顶处的应力和应变较大,但仍然在材料屈服极限允许的范围内,不会在使用过程中出现压溃或者拉裂等现象,同时我们可以通过相应的热处理工艺来提高轮齿的刚度和强度,保证产品的使用性能。
(2)对行星轮系三维参数化模型进行模态分析,得到了1~6阶固有频率和振动模态。通过分析可知,行星轮系的主要模态是行星齿轮的弯曲振动,在结构设计过程中可通过增加齿厚,合理分配刚度等措施,避免行星轮系在工作中发生共振。
- 上一篇:没有啦
- 下一篇:新能源车电池包 CAE 仿真都有哪些内容? 2026/3/10