基于 FlexSim 仿真平台搭建线边库配送仿真模型
2026-2-6 16:39:31 点击:
FlexSim线边库配送模型(AGV+无人叉车)实现过程
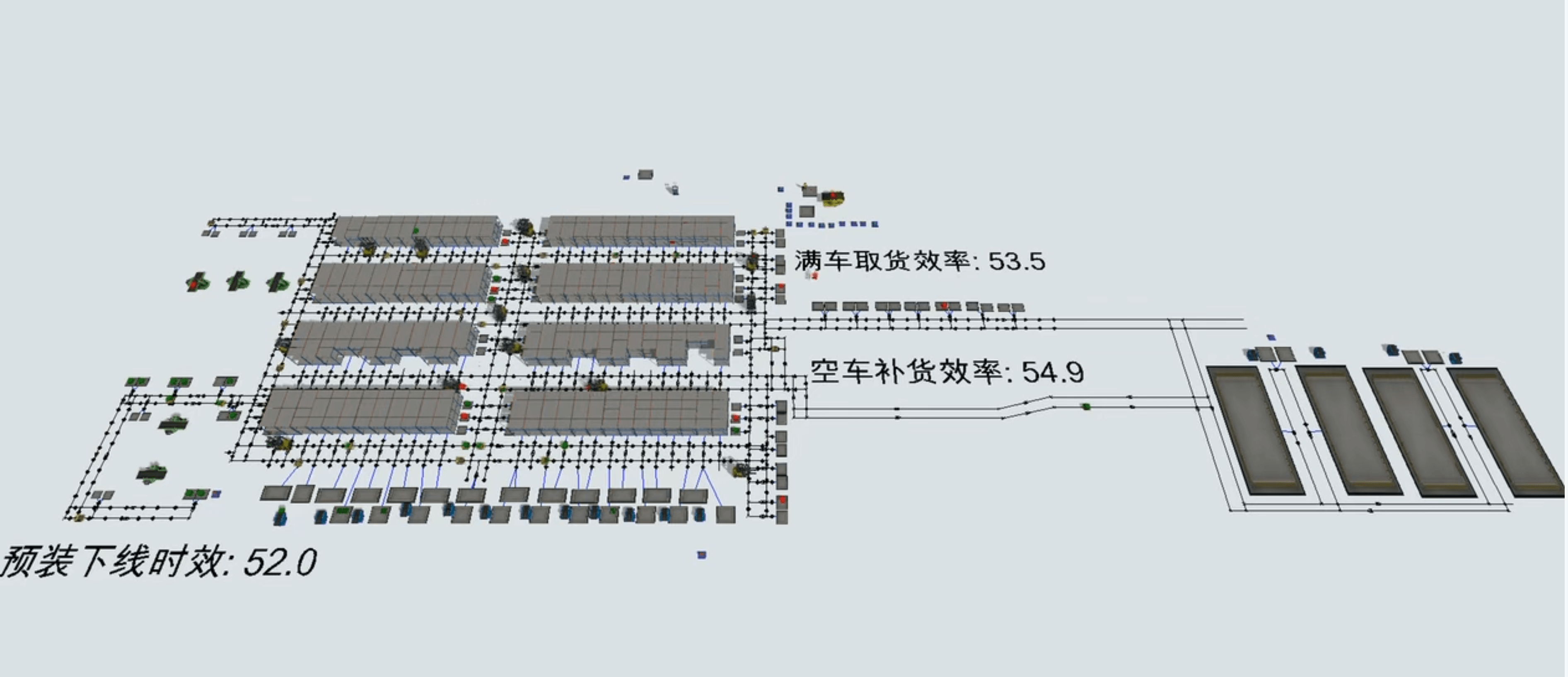
本次基于FlexSim仿真平台,搭建线边库配送仿真模型,实现AGV与无人叉车的规范路径行驶及防碰撞控制,具体实现过程简洁如下:
1. 建模准备:明确线边库布局、配送节点及设备参数,在FlexSim中搭建线边库、配送工位等基础场景,导入AGV与无人叉车模型,匹配实际设备尺寸及运动属性。
2. 路径规划:根据配送流程及节点需求,规划AGV与无人叉车的行进路线,明确起点、终点、转弯点及停靠位置,划分设备专属行驶区域,避免路线交叉冲突隐患。
3. 约束设置:添加防追尾、防碰撞约束逻辑,设置设备安全间距、会车避让规则及路径占用优先级,确保多设备并行时互不干扰。
4. 调试运行:启动仿真模型,验证路径合理性及约束有效性,排查碰撞、追尾及路线偏离问题,优化参数,确保设备严格按预设路线有序行进,完成模型落地。
- 上一篇:基于 ABAQUS 的钢结构螺栓连接有限元分析案例 2026/2/7
- 下一篇:基于ANSYS Icepak的断路器开关柜热仿真优化解决方案 2026/2/5