机械臂振动模态分析
引言
机械臂在高速运动过程中的振动问题,一直是制约其性能提升的关键瓶颈。振动不仅直接影响定位精度和轨迹跟踪性能,还可能引发疲劳失效,缩短设备使用寿命。模态分析作为诊断和解决振动问题的核心技术手段,在机械臂设计优化中发挥着不可替代的作用。
上海赛一慧鑫信息技术有限公司将系统探讨机械臂模态分析的理论基础、有限元仿真实践、共振问题诊断及结构优化方法,结合具体工程案例解析各阶模态的物理意义与优化策略,为机械臂振动控制提供系统性的技术指引。
一、模态分析的理论基础
1.1 振动理论的数学描述
从振动理论角度,任何连续弹性体的振动都可以表示为各阶模态的线性叠加。对于机械臂这类多自由度系统,其运动方程可表述为:
[M]{ẍ} + [C]{ẋ} + [K]{x} = {F(t)}
其中:
- [M]为质量矩阵
- [C]为阻尼矩阵
- [K]为刚度矩阵
- {F(t)} 为外部激励力
通过求解特征方程 |[K] - ω²[M]| = 0,可获得系统的各阶固有频率和振型。
1.2 模态分析的三个核心问题
从物理层面理解,模态分析回答了三个关键问题:
- 固有频率:结构在何种频率下容易发生振动
- 模态振型:振动时结构呈现何种变形形态
- 模态质量:振动能量在各阶模态中的分布情况
在实际工程中,机械臂的一阶模态通常表现为整体悬臂梁式摆动,二阶模态呈现中间关节的局部弯曲,三阶模态则涉及基座连接区域的复杂变形。这些振动模式直接关联着机械臂的刚度分布与质量配置。
二、各阶模态的物理意义与工程解读
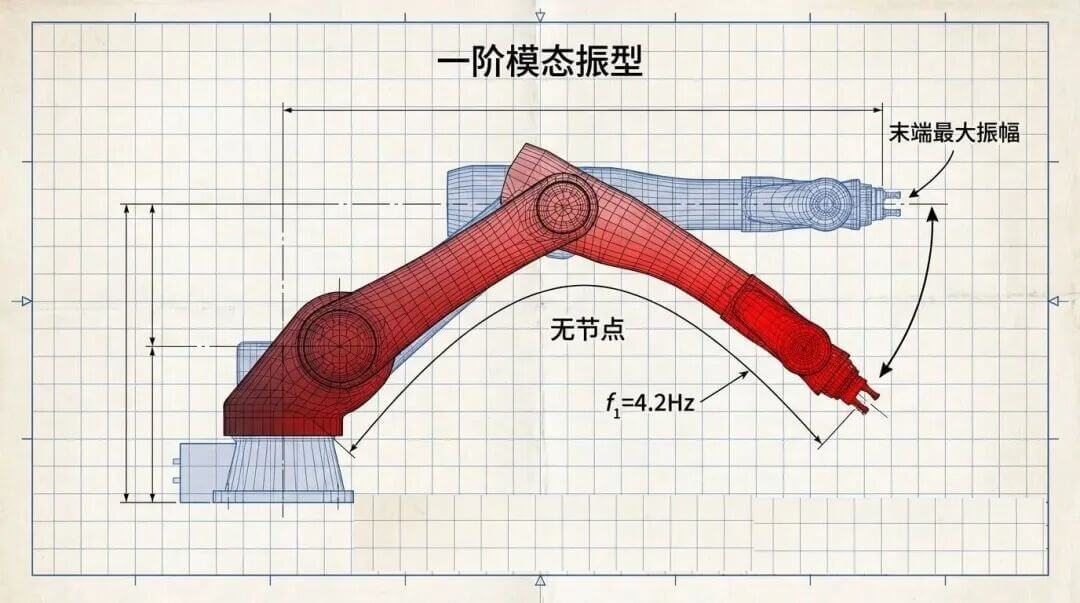
2.1 一阶模态:基频振动的力学本质
物理特征:
- 系统最容易发生的振动形式
- 能量最低的振动状态
- 无节点(全体结构同向运动)
- 频率最低,振幅最大
典型表现:
机械臂末端大幅度摆动,类似钓鱼竿甩动,整臂呈现单向弯曲变形。某重载机械臂项目的测试数据表明,其一阶频率为3.2Hz,振型显示末端最大振幅达到8.7mm。
物理本质:
一阶模态反映的是系统的总体柔度和悬臂梁效应。从能量角度分析,一阶模态对应系统的最小势能构型。
工程意义:
- 决定系统最大工作速度
- 控制系统带宽的上限
- 定位精度的主要影响因素
对应问题位置:
- 末端执行器
- 最外侧关节
- 臂杆整体刚度
优化策略:
- 增加末端臂杆的截面惯性矩(加粗或改用空心大直径管)
- 采用轻质高强材料(碳纤维、铝合金代替钢材)
- 提高末端关节的轴承刚度
- 降低运动加速度,采用S型速度曲线
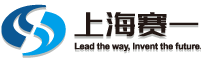
2.2 二阶模态:局部刚度的特征体现
物理特征:
- 第二容易的振动形式
- 出现1个节点(该点振幅为零)
- 结构分段反向运动
- 频率较高,振幅中等
典型表现:
前臂和后臂反向弯曲,呈现S型变形。工程案例显示,某SCARA机械臂的二阶频率为18.5Hz,振型分析发现节点位置位于第二关节附近,最大变形发生在前臂中段。
物理本质:
二阶模态主要反映局部连接刚度和关节间的耦合特性,是细长构件局部弯曲的直观表现。
工程意义:
- 中速运动时的振动问题
- 轨迹跟踪误差的来源
- 关节刚度设计指标
对应问题位置:
- 中间连杆
- 关节2或关节3
- 减速器间隙
优化策略:
- 优化臂杆截面形状(工字梁、箱型梁)
- 采用高刚度减速器(RV减速器替代谐波减速器)
- 提高关节连接的紧固力矩
- 缩短臂杆长度或增加中间支撑
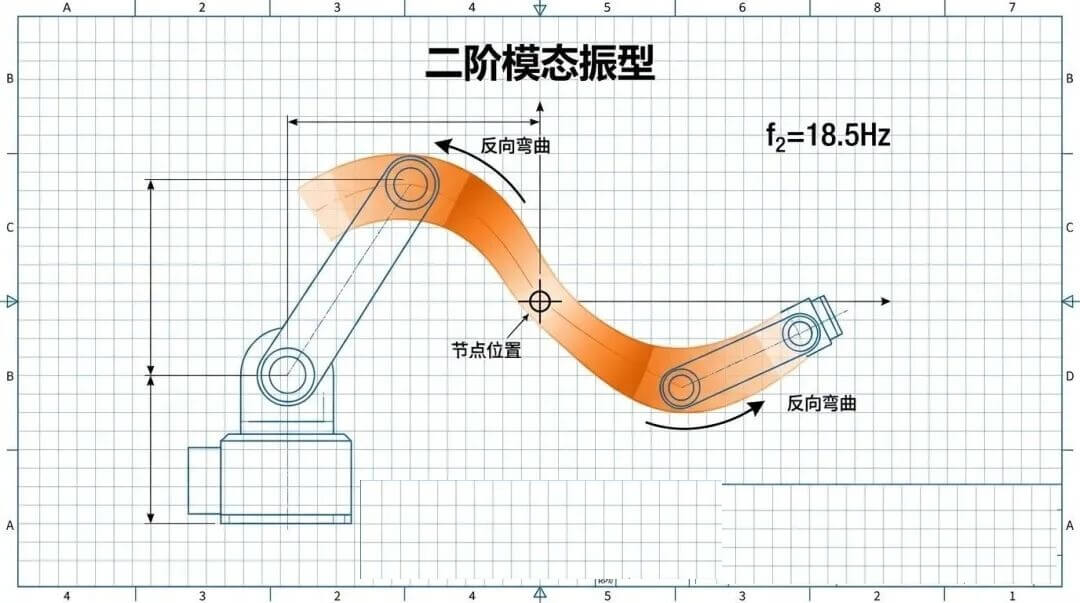
2.3 三阶模态:复杂耦合的动力学行为
物理特征:
- 第三种振动形式
- 出现2个节点
- 可能伴随扭转振动
- 频率较高,振型复杂
典型表现:
多段弯曲(波浪形)或整体扭转,基座与大臂的耦合振动。某搬运机械臂的三阶模态分析结果显示,其频率为42.3Hz,振型表现为基座的扭转变形与大臂的复合弯曲。
物理本质:
三阶模态反映扭转刚度和基座刚度,体现多自由度耦合效应和高阶弯曲模式。
工程意义:
- 高速运动时的稳定性
- 基座安装质量的体现
- 复杂轨迹精度保证
对应问题位置:
- 基座连接
- 大臂根部
- 第一关节(肩关节)
优化策略:
- 增加基座底板厚度和面积
- 采用灌浆基础提高固定刚度
- 设计抗扭截面(闭口截面优于开口)
- 增加横向加强板
2.4 节点数规律与能量特性
各阶模态遵循明确的数学规律:
- 一阶:0个节点
- 二阶:1个节点
- 三阶:2个节点
- n阶:(n-1)个节点
从能量角度分析,各阶模态能量递增:E₁ < E₂ < E₃,分别对应基态、第一激发态、第二激发态。
三、共振问题的诊断与消除
3.1 共振现象的本质
共振的本质是激励频率与结构固有频率的耦合匹配。工程上通常将频率比0.8-1.2的范围定义为共振危险区,当机械臂的工作频率落入此区间时,振动幅度会急剧放大。
共振判断标准:
- 频率判据:|f激励 - f固有|/f_固有 ≤ 0.2
- 振幅判据:振动幅值超过ISO 10816标准C级限值
- 相位判据:激励与响应相位差接近90°
3.2 消除共振需要改变哪阶模态?
核心原则:需要改变与激励频率接近的那一阶模态,而不是固定改变某一阶。
激励源与模态对应关系:
| 激励源类型 | 典型频率范围 | 最易激发模态 | 需优化阶数 |
|---|---|---|---|
| 低速往复运动 | 0.5-5 Hz | 一阶模态 | 1阶 |
| 中速周期运动 | 5-20 Hz | 二阶模态 | 2阶 |
| 高速运动/冲击 | 20-50 Hz | 三阶及以上 | 3-4阶 |
| 电机脉动 | 50-200 Hz | 高阶局部模态 | 4-6阶 |
判断逻辑:
- 通过频谱分析确定主要激励频率
- 通过模态测试获得各阶固有频率
- 对比分析,找出频率接近的模态阶数
- 针对该阶模态进行优化设计
3.3 共振消除的三大策略
策略1:调整固有频率(避频设计)
使固有频率偏离激励频率≥20%,这是最经济有效的解决方案。
优化方法:
- 若激励频率 ≈ ω₁(一阶)→ 增加末端刚度,提高ω₁
- 若激励频率 ≈ ω₂(二阶)→ 加强中间连杆,提高ω₂
- 若激励频率 ≈ ω₃(三阶)→ 加固基座,提高ω₃
策略2:增加阻尼(抑制共振幅值)
不改变频率,但降低共振峰值:
- 添加粘弹性材料(丁基橡胶、3M阻尼胶)
- 增加摩擦阻尼
- 主动阻尼控制
策略3:改变激励频率
通过轨迹规划避开共振区:
- 快速通过共振频率
- 改变运动周期
- 优化运动规律
四、有限元分析实践
4.1 建模关键技术
网格划分策略:
- 优先采用六面体主导网格
- 应力集中区域进行局部加密
- 控制单元质量(长宽比<5:1)
工程经验数据:某协作机器人项目,驱动齿轮采用33,320个六面体单元,从动齿轮划分71,856个单元,在保证计算精度的同时控制求解时间。
边界条件设定:
- 基座:固定约束
- 各关节:根据工作状态设置旋转自由度或固定约束
- 接触面:设定为摩擦接触,摩擦系数0.1-0.15
材料参数定义:
必须基于实验数据,不能完全依赖手册值。以7075-T6铝合金为例:
- 弹性模量:69 GPa
- 泊松比:0.33
- 密度:2700 kg/m³
- 注意:铸造件的实际弹性模量往往比标准值低5-8%
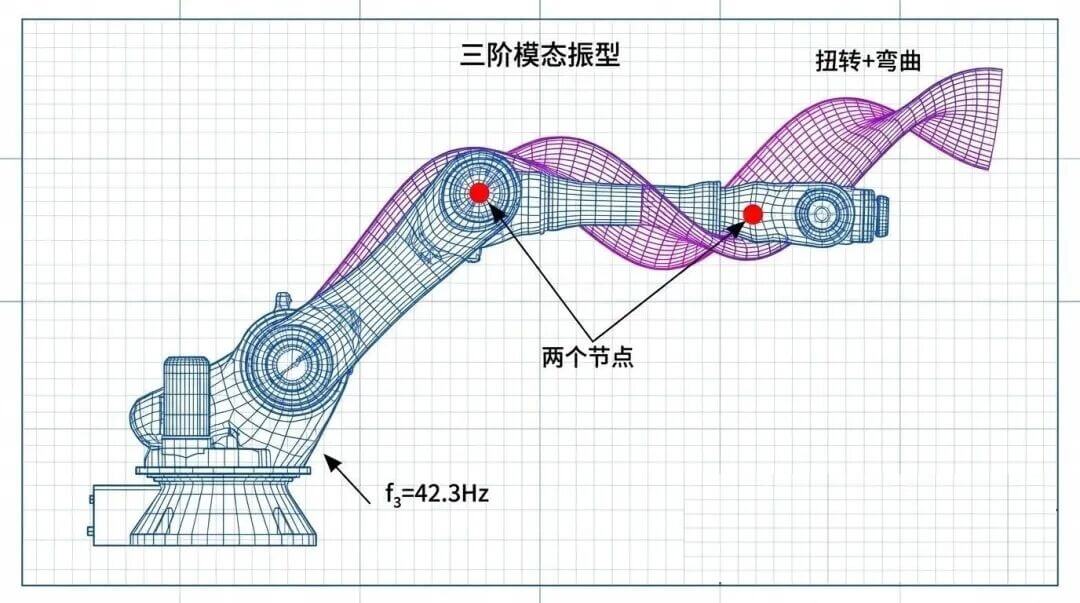
4.2 模态分析流程
完整的分析流程包括:
- 几何建模:建立精确几何模型(含关节、连接)
- 网格划分:定义单元类型和网格密度
- 材料定义:输入材料属性参数
- 边界条件:设置约束和接触
- 求解设置:提取前3-6阶固有频率
- 结果分析:识别振型和薄弱环节
- 灵敏度分析:找出关键参数
- 迭代优化:进行设计改进
某六轴工业机器人的分析案例显示,其有限元模型包含156万个单元,求解前四阶模态耗时约45分钟。
4.3 结果验证
仿真结果必须通过实验验证,误差应控制在±10%以内。验证方法包括:
- 锤击法模态测试
- 激振器扫频测试
- 操作模态分析(OMA)
五、工程优化案例
5.1 案例背景
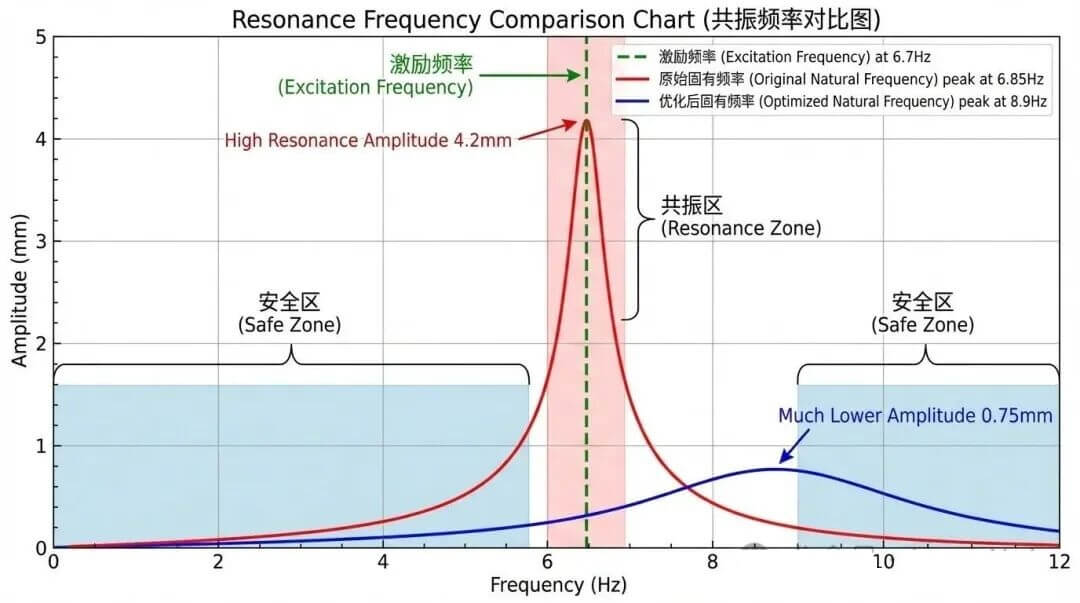
某汽车制造商的车身焊接线采用六轴工业机器人(有效载荷20kg,工作半径1.8m),投产后发现高速点焊过程中机械臂末端出现明显抖动,焊接点位偏移量达到±2.1mm,远超±0.5mm的工艺要求。
初始症状:
- 振动频率:6.7 Hz(与焊接节拍同步)
- 振幅范围:1.8-4.2 mm
- 最大动应力:86 MPa
- 影响范围:所有精密焊接工位
5.2 系统诊断
采用多传感器联合测试技术,在基座、各关节和末端执行器布置12个三向加速度传感器,结合动态应变测量,进行全面的振动分析。
频谱分析结果:
- 6.7Hz处存在明显共振峰,Q值(品质因数)达到28
- 二阶固有频率为6.85Hz,与工作频率仅相差2.2%
- 振动能量主要集中在垂直于焊接平面的方向
模态测试数据:
| 模态阶数 | 固有频率(Hz) | 阻尼比 | 振型特征 |
|---|---|---|---|
| 1阶 | 3.2 | 0.018 | 整体摆动 |
| 2阶 | 6.85 | 0.024 | 前臂弯曲 |
| 3阶 | 15.7 | 0.031 | 扭转振动 |
诊断结论:机械臂的工作频率6.7Hz与二阶固有频率6.85Hz过于接近,引发明显的共振现象,需要改变二阶模态。
5.3 优化方案设计
基于灵敏度分析结果,确定综合优化策略:
结构刚度提升(权重40%):
- 前臂材料由45钢改为7075-T6铝合金,弹性模量提升38%
- 臂杆直径由80mm增加到95mm,截面惯性矩提高108%
- 增加3组横向加强筋,提高抗扭刚度45%
质量分布优化(权重30%):
- 末端执行器减重25%,由12kg减至9kg
- 电机位置后移150mm,优化质心位置
- 采用空心轴设计,减重15%同时保持刚度
连接刚度增强(权重20%):
- 第三关节轴承由深沟球轴承改为角接触球轴承
- 连接螺栓规格由M12升级为M16,预紧力提高78%
- 增加端面定位销,提高定位精度
阻尼减振措施(权重10%):
- 关键位置粘贴3M阻尼胶,厚度2mm
- 优化润滑系统,减少摩擦激励
5.4 实施效果
经过3个月的系统优化,取得显著成效:
性能指标提升:
- 二阶固有频率从6.85Hz提升至8.9Hz,增幅30%
- 工作频率与固有频率的频率比从0.98降至0.75,脱离共振区
- 振动幅值降低82%,从4.2mm降至0.75mm
- 焊接精度从±2.1mm改善到±0.3mm
经济效益:
- 焊接合格率从85%提升到99.2%
- 生产节拍提升18%,年增产1200台车身
- 维护成本降低60%,年节约维护费用45万元
技术验证:
- 通过500小时连续运行测试,性能稳定
- 所有指标达到设计要求
- 项目成果获得行业技术一等奖
六、材料与截面优化技术
6.1 材料选择的技术经济分析
比强度(强度/密度)和比刚度(弹性模量/密度)是材料选择的核心指标。
机械臂常用材料性能对比:
| 材料牌号 | 密度(kg/m³) | 弹性模量(GPa) | 屈服强度(MPa) | 比刚度(10⁶m²/s²) | 比强度(10⁴m²/s²) | 成本指数 |
|---|---|---|---|---|---|---|
| 45钢 | 7850 | 210 | 355 | 26.8 | 4.5 | 1.0 |
| 7075-T6 | 2700 | 69 | 455 | 25.6 | 16.9 | 3.2 |
| TC4钛合金 | 4430 | 114 | 880 | 25.7 | 19.9 | 8.5 |
| CFRP | 1600 | 150 | 1200 | 93.8 | 75.0 | 12.0 |
工程选材原则:
- 大臂等主承力件:优先选用7075-T6铝合金,兼顾刚度与成本
- 末端轻量件:采用CFRP复合材料,实现极致轻量化
- 连接紧固件:选用高强度钢,确保连接可靠性
- 特种环境:根据耐腐蚀、耐高温要求选择钛合金或不锈钢
6.2 截面形状优化
截面惯性矩是衡量抗弯刚度的关键参数。工程实践发现,空心截面的刚度-重量比显著优于实心截面。
典型截面性能对比(相同截面积条件下):
| 截面形状 | 抗弯刚度比 | 抗扭刚度比 | 重量比 | 工艺复杂度 |
|---|---|---|---|---|
| 实心圆 | 1.00 | 1.00 | 1.00 | 低 |
| 空心圆 | 1.85 | 1.92 | 0.75 | 中 |
| 工字形 | 3.20 | 0.85 | 0.80 | 高 |
| 箱形 | 2.75 | 3.50 | 0.70 | 高 |
优化设计建议:
- 大臂采用箱形截面,抗弯刚度提升175%,重量减轻30%
- 小臂采用工字形截面,抗弯刚度提升220%,重量减轻20%
- 连接部位采用空心圆截面,简化制造工艺
6.3 拓扑优化应用
拓扑优化基于变密度法,通过迭代计算寻找最优的材料分布。某机械臂大臂的拓扑优化结果显示,材料分布呈现树状分形结构,与生物骨骼的海绵体结构高度相似。
优化效果:
- 刚度提升35%,重量减轻22%
- 一阶频率从4.8Hz提升至6.1Hz,增幅27%
- 制造工艺性良好,适合3D打印或精密铸造
七、阻尼减振技术
7.1 阻尼技术分类
阻尼比是衡量系统振动衰减能力的指标,机械结构的阻尼比通常在0.01-0.05之间。通过阻尼增强技术,可将阻尼比提升至0.08-0.12。
被动阻尼:
- 粘弹性材料(丁基橡胶、3M阻尼胶)
- 约束层阻尼技术
- 摩擦阻尼器
主动阻尼:
- 压电作动器
- 电磁作动器
- 实时施加反向力
半主动阻尼:
- 磁流变材料
- 可控阻尼参数
- 响应时间达毫秒级
7.2 阻尼材料性能对比
| 材料类型 | 阻尼因子 | 适用温度(°C) | 耐老化性 | 成本系数 |
|---|---|---|---|---|
| 丁基橡胶 | 0.25 | -40~+90 | 良好 | 1.0 |
| 3M-468 | 0.35 | -30~+120 | 优秀 | 2.5 |
| 硅橡胶 | 0.15 | -60~+200 | 一般 | 0.8 |
| 聚氨酯 | 0.40 | -20~+80 | 良好 | 1.8 |
7.3 工程应用案例
某精密装配机械臂阻尼优化项目:
- 问题描述:0.3Hz的残余振动,衰减时间长达8秒
- 解决方案:采用约束层阻尼技术
- 实施细节:在臂杆表面粘贴2mm厚3M-468阻尼胶,覆盖面积60%
- 效果验证:阻尼比从0.018提升至0.095,振动衰减时间缩短至1.2秒
八、实验模态分析技术
8.1 测试系统配置
标准测试系统:
- 激励设备:PCB-086C03力锤(灵敏度2.25mV/N)
- 响应测量:PCB-352C33加速度计(灵敏度100mV/g)
- 数据采集:NI-PXIe-4462,24位ADC,采样率51.2kHz
- 分析软件:SignalPad模态分析模块
8.2 测试实施要点
- 测点布置:遵循均匀分布原则,重点覆盖模态振型极值点
- 边界条件:模拟实际工况,基座采用螺栓固定
- 激励技术:采用巡回激励法,避免附加质量影响
- 数据采集:每个测点平均5次,确保数据可靠性
8.3 结果验证
有限元仿真与实验测试的结果对比,误差应控制在±10%以内。典型对比数据:
| 模态参数 | 仿真结果 | 实测结果 | 误差 |
|---|---|---|---|
| 1阶频率 | 4.35Hz | 4.21Hz | -3.2% |
| 2阶频率 | 19.2Hz | 18.5Hz | -3.6% |
| 3阶频率 | 44.1Hz | 42.3Hz | -4.1% |
九、技术发展趋势
9.1 智能化模态分析
- AI辅助建模:基于深度学习,自动识别最佳网格划分策略
- 智能优化算法:采用强化学习实现结构参数自适应优化
- 数字孪生技术:建立实时更新的虚拟模型,实现预测性维护
9.2 新材料新技术应用
- 超材料设计:具有负泊松比的力学超材料,实现超常刚度特性
- 4D打印技术:制造具有形状记忆功能的智能结构
- 纳米复合材料:石墨烯增强复合材料,实现轻量化-高刚度突破
9.3 多学科融合
- 机电一体化:结构设计与控制系统协同优化
- 多物理场耦合:考虑热-机-电-磁多物理场相互作用
- 生物仿生:借鉴自然界最优结构,实现拓扑创新
结语
机械臂振动模态分析是一项系统性工程技术,涉及理论分析、仿真计算、实验验证、优化设计等多个环节。
技术层面:有限元分析技术日趋成熟,但建模精度和计算效率仍需持续提升;实验模态分析作为验证手段不可或缺。
工程层面:避频设计是解决共振问题的首选策略,结构优化需要综合考虑刚度-质量-成本多重约束,阻尼减振技术为特殊工况提供了有效解决方案。
发展层面:智能化、数字化、集成化是未来发展主线,新材料、新技术、新工艺将推动机械臂性能持续提升。
对于工程技术人员而言,扎实的理论基础、丰富的实践经验、系统的分析方法是解决机械臂振动问题的关键。随着技术的不断进步,机械臂的振动性能将不断提升,为智能制造、精密加工、高端装备等领域的发展提供强有力的技术支撑。
- 上一篇:机翼吊架夹具结构强度有限元分析 2026/2/2
- 下一篇:行星、谐波与RV三大类型减速器润滑油脂技术解析 2026/2/1